При курсовом и дипломном проектировании вертолетов важным разделом является расчет массы вертолета. От тщательного выполнения этого раздела будут зависеть производительность и себестоимость работ спроектированного вертолета.
Расчет масс вертолета можно проводить в два этапа: расчет массы вертолета в первом приближении и расчет массы вертолета во втором приближении с составлением ведомости масс вертолета.
В расчетах масс вертолета необходимо использовать статистические данные однотипных вертолетов для более рационального и обоснованного выбора и оценки параметров и характеристик проектируемого вертолета.
Взлетную массу вертолета в первом приближении следует определять по формуле:
где - коэффициент коммерческой отдачи, взятый из статистических данных.
Для пассажирского вертолета
где - количество пассажиров.
Для грузового вертолета
где тгр - масса груза.
Взлетную массу вертолета во втором приближении надо определять, как сумму масс частей вертолета, агрегатов и его систем. При расчете массы вертолета во втором приближении рекомендуется последовательно определить массу силовой установки, топлива и топливной системы, рулевого винта, трансмиссии, фюзеляжа, системы управления, шасси, оборудования.
Статистические данные проектируемого вертолета приведены в таблице 1.
Таблица 1
|
Параметры проектируемого вертолета |
Величина |
|||
|
Взлетная масса, кг |
||||
|
Количество пассажиров, чел. |
||||
|
Масса коммерческой нагрузки, кг |
||||
|
Масса полной нагрузки, кг |
||||
|
Относительная масса коммерческой нагрузки, °А |
||||
|
Относительная масса полной нагрузки, % |
||||
|
Количество двигателей, шт |
||||
|
Тип двигателей, марка |
||||
|
Суммарная мощность, кВт |
||||
|
Диаметр несущего винта, м |
||||
|
Количество лопастей на несущем винте, шт |
||||
|
Коэффициент заполнения несущего винта |
||||
|
Диаметр рулевого винта, м |
||||
|
Количество лопастей на рулевого викте, шт |
||||
|
Расстояние между осями несущего и рулевого, м |
||||
|
Максимальная скорость на высоте Н = 500 м, км/ч |
||||
|
Крейсерская скорость на высоте Н = 500 м, км/ч |
||||
|
Динамический потолок, м |
||||
|
Статический потолок, м |
||||
|
Дальность полета, км |
Масса несущего винта включает массу лопастей и массу втулки, При определении массы лопастей несущего винта вертолета следует учитывать, что вертолеты общего назначения должны работать на режиме висения вблизи земли и скорость отбрасываемого винтом потока воздуха должна быть строго ограничена. Скорость отбрасываемого винтом воздуха зависит от средней удельной нагрузки на ометаемую винтом поверхность Р, поэтому вводятся ограничения по Р.
Для вертолетов, не предназначенных для выполнения монтажных работ, при которых под вертолетом находятся люди, Р?0.70...0.80 кН/м 2 .
Для вертолетов-кранов, используемых для монтажных работ, при которых под вертолетом на режиме висения находится специально обученный и экипированный персонал, Р?0.50...0.60 кН/м 2 .
Для вертолетов, используемых для подъема людей на режиме висения, Р?0.30…0.35 кН/м 2 .
По выбранной Р для проектируемого вертолета можно определить радиус лопасти несущего винта:
По статистическим данным необходимо определить количество лопастей несущего винта и хорду лопасти несущего винта b. Для лопасти со стальным трубчатым лонжероном и стеклопластиковым каркасом b 0.45... 1.00 м и дюралю-миниевым прессованным лонжероном b0.25...0.80м.
Коэффициент заполнения можно определить по формуле:
где - средняя хорда лопасти.
Ч0.52Ч10.644 = 115.5 кг
где kл - весовой коэффициент, учитывающий размеры лопасти; - хорда лопас-ти на 0.7.
Массу комплекта лопастей можно найти по уравнению:
115.55 = 577.5 кг
Массу втулки несущего винта необходимо определять в зависимости от центробежной силы лопасти, которую можно вычислить по формуле:
где g - ускорение свободного падения; - угловая скорость;
Относительная координата центра масс лопасти.
Чтобы учесть действие на втулку несущего винта различных величин центробежной силы, крутящего момента, числа лопастей несущего винта, при расчете массы можно воспользоваться формулой М. А. Лейканда:
где =1.15; =1.05 при <4 и = 1.00 + (- 4) при 4 - коэффициент, учитывающий количество лопастей.
Масса силовой установки в значительной степени зависит от мощности на валу несущего винта. Одним из наиболее нагруженных (по потребляемой мощности) режимов полета вертолета считается висение на высоте статического потолка. Поэтому для дальнейших расчетов можно пользоваться потребной мощностью на валу несущего винта, определенной для режима висения вертолета на высоте статического потолка:
где тк - коэффициент мощности; - плотность воздуха; - окружная скорость конца лопасти; F - площадь ометаемой поверхности.
Для режима висения на высоте статического потолка коэффициент мощности равен:
где - коэффициент учета крутки лопасти; - коэффициент взаимного влияния (для одновинтового вертолета =1.00), приведены в таблице 2; коэффициент потерь тяги:
Эффективный относительный радиус НВ:
Относительная масс топлива:
Относительная плотность воздуха на высоте:
где - плотность воздуха на высоте; - плотность воздуха на земле; - коэффициент, зачитывающий потери тяги из-за обдувки частей вертолета, находящихся в струе винта (для бескрылых вертолетов =1.02);
Относительный радиус втулки:
где - радиус втулки; =0.02 - среднее по диску несущего винта значение коэффициента профильного сопротивления, определяемое для среднего коэффи-циента подъемной силы:
по поляре профиля в сечении r =0.7; кт,кр - коэффициенты учета фермы лопасти в плане; тсж=2.75Ч10-4 - приращение коэффициента профильной мощности из-за сжимаемости воздуха.
Таблица 2
Таблица 3
Потребную мощность двигателей на входе в главный редуктор на режиме висения на высоте статического потолка модно определить как:
где - коэффициент использования мощности:
0.96 - коэффициент использования мощности несущим винтом;
0.05…0.12 (малые значения относятся к легким по взлетной массе вертолетам);
0.94 - коэффициент использования мощности рулевым винтом;
Относительная потребная мощность для привода агрегатов:
0.05…0.012 у вертолетов средней грузоподъемности;
0.012…0.025 у легких вертолетов.
Обычно для обеспечения необходимых летных характеристик вертолета во всем требуемом диапазоне высот и температур наружного воздуха на вертолет ставят двигатель, мощность которого в стандартных условиях у земли оказывается излишне большой. Чтобы не перегружать трансмиссию, его мощность с помощью регулирующей аппаратуры ограничивают величиной, необходимой для обеспечения требуемых характеристик вертолета, определяемых по режиму висения в заданных по высоте и температуре наружного воздуха условиях. Этой величиной мощность ограничивается на всех высотах, начиная от Н = 0 м и до высоты начала ограничений.
Поскольку ограничения мощности практически не влияют на массу двигателя, то его удельную массу молено оценивать по той максимальной мощности, которая была бы при Н = 0 м, если бы никаких регулировочных ограничений не вводилось.
При расчетах масс вертолетов удобнее массу двигателя относить к максимальной мощности, приведенной к высоте Н = 500 м, а не к высоте Н = 0 м, на которой требуется выполнять полет для проверки заданной дальности вертолета. Для приведения мощности двигателя к высоте Н = 500 м, необходимо приме-нять коэффициент, характеризующий изменение мощности двигателя по высоте:
Приведенную мощность одного двигателя можно определить по формуле:
где - количество двигателей.
Двигатели для проектируемого вертолета следует подбирать из справочной литературы по потребной мощности. Данные выбранного двигателя заносятся в ведомость статистических данных проектируемого вертолета.
В предварительных расчетах массу двигателей можно определить по формуле:
где = 1,0... 1,2 - весовой коэффициент двигателей.
Массу систем силовой установки, включающих в себя крепление двигателей, системы всасывания и выхлопа, масляную и противопожарную системы, удобно отнести к приведенной мощности:
где = 0,04...0,05 - весовой коэффициент силовой установки. В целом по силовой установке вертолета без топливной системы можно принять:
где - удельная масса силовом установки:
Массу топлива следует определять по формуле:
где = 1,19 - коэффициент, учитывающий 5 % - ный навигационный запас, расход топлива на переходных режимах и запас возможных неточностей расчета; - удельный расход топлива в горизонтальном полете; - номинальная мощность двигателей; L- дальность полета; - скорость горизонта-льного полета.
Масса топливной системы зависит от полного запаса топлива:
Для топливной системы одновинтового вертолета с протестированными баками можно достигнуть значений коэффициента =0.07...0.09. Для системы без протестированных баков возможно снижение этого коэффициента до значения = 0.06... 0.07.
Масса топливной системы двухвинтовых вертолетов продольной и поперечной схемы возрастает, если баки достаточно далеко отнесены от двигателей.
Применение гермоотсеков, масса которых обычно относится к конструкции планера, может привести к снижению коэффициента до?0.035...0.040.
Для вертолетов одновинтовой и продольной схемы массу капотов удобно включать в массу фюзеляжа. Выделение массы капотов из массы фюзеляжа вертолетов поперечной схемы необходимо для более точного определения массы гондолы, требующейся при расчете консолей крепления винтов. Массу каркасных капотов следует определять по формуле:
где =4.5...5.5кг/м2 - статистический коэффициент массы калотов; - площадь поверхности капотов, м.
Значения массы двигателей, масляной и противопожарной систем в дальнейшем конкретизируются после расчетов по подбору двигателя. Паспортные данные двигателей можно занести в ведомость масс вертолета и откорректировать за счет них значения массы систем силовых установок.
Массы элементов рулевых винтов одновинтового вертолета подчиняются тем же законам, что и массы элементов несущего винта.
Однако рулевой винт работает в существенно более тяжелых условиях в широком диапазоне изменения тяг и углов атаки, в условиях разворотов с большими угловыми скоростями на висении у земли по сравнению с несущим винтом. Лопасти рулевого винта испытывают большие нагрузки при ударе незашвартованной лопасти об ограничитель махового движения при порыве шквального ветра.
Коэффициент заполнения рулевого винта:
Количество лопастей рулевого винта обычно меньше количества лопастей несущего винта и приближенно определяется по формуле:
По статистическим данным необходимо определить хорду лопасти рулевого винта. Для лопасти деревянной конструкции b = 0,10…0,25 м и для лопасти выпол-ненной из композиционных материалов и дюралюминия т.
Радиус рулевого винта можно определить по формуле:
Расстояние между осями несущего и хвостового винта:
где = 0,25 м - зазор, необходимый для изменения в небольших пределах диаметров несущего и рулевого винтов.
Массу одной лопасти рулевого винта можно определить по формуле:
Центробежная сила, действующая на каждую лопасть рулевого винта:
где - угловая скорость лопастей несущего винта (по статистическим данным частота вращения рулевых винтов - отно-сительная координата центра масс лопасти рулевого винта определяется по формуле:
Массу втулки рулевого винта можно определить по формуле:
Масса трансмиссии вертолета находится в прямой зависимости от передаваемого крутящего момента.
Для передачи крутящего момента от силовой установки к несущему и рулевому винтам используется трансмиссия, включающая главный, промежуточные и хвостовые редукторы, а также валы трансмиссии. Для определения массы трансмиссии необходимо иметь ее предварительную кинематическую схему, а также знать взлетную и номинальную мощность силовой установки. Таким образом, массу, трансмиссии следует рассчитывать по уравнению:
где - масса главного редуктора; - масса промежуточного редуктора; - масса хвостового редуктора; - масса валов трансмиссии.
Массу главного редуктора надо определять величиной крутящего момента, передаваемого на несущий винт:
Коэффициент, сопоставимый для редукторов одного размера, сходных схем и передаточных отношений.
Анализ данных масс построенных редукторов показывает, что уменьшение величин передаваемых крутящих моментов приводит к увеличению, так как нельзя уменьшать бесконечно стенки шестерен и корпусов, по статистике =0.340...0.525.
Промежуточные и хвостовые редукторы обычно имеют очень малые передаточные отношения и состоят из двух конических шестерен. Так как крутящие моменты, передаваемые этими редукторами, изменяются в широких пределах, в формулу для определения массы этих редукторов следует вводить эквивалентный крутящий момент:
где - крутящий момент хвостового винта.
Для современных промежуточных и хвостовых редукторов можно принять: =0.70...0.90; =0.65...0.80.
Расчеты показывают, что для одновинтового вертолета с достаточной степенью точности эквивалентный крутящий момент может быть принят равным моменту на ведомом валу редуктора на режиме висения при Н = .
Если для одновинтового вертолета масса трансмиссионных валов относительно невелика, то для поперечной и особенно продольной схемы их масса оказывается столь значительной, что существенно влияет на общую массу конструкции вертолета.
Выбор размеров трубы вала производится по потере устойчивости, которая может произойти при разрушающем крутящем моменте
Массу трансмиссионных валов следует определить по формуле:
где = 0,06…0,08 - массовый коэффициент валов; - число валов; - суммарная длина валов трансмиссии; - коэффициент эксплуатационной пере-грузки (, если двигатели расположены в одном месте, если двигатели разнесены); = 1,5 - коэффициент безопасности; - крутящий момент, передаваемый валом (для двухвинтовых вер-толетов, для одновинтовых вертолетов).
Перед выполнением расчета масс фюзеляжа должна быть сделана самая предварительная общая компоновка вертолета, учитывающая требуемые размеры грузовой кабины, для определения основных отправных данных вертолета и его фюзеляжа, схемы двигательной установки и трансмиссии.
Размеры носовой части, где расположена кабина экипажа, должны соответствовать нормам летной годности вертолетов и эксплуатационнотехническим требованиям (ЭТТ), а для грузовой кабины и хвостовой балки следует использовать данные, приведенные в таблице 5.
Таблица 5
|
Схема вертолета |
Взлетная масса, кг |
Размеры грузовой кабины, мм |
Хвостовая балка, мм |
||
|
Одновинтовая |
|||||
|
Двухвинтовая |
|||||
|
Продольная |
|||||
|
Поперечная |
Масса фюзеляжа не сильно зависит от действующих на вертолет нагрузок и связана с площадью поверхности, которой должна быть закрыта конструкция фюзеляжа. Предварительно массу фюзеляжа надо определять по формуле:
где - масса одного квадратного метра соответствующих частей вертолета; - площадь поверхности различных элементов фюзеляжа.
Если конструкция выполняется из одного материала с использованием одинаковых технологических приемов, формулу можно упростить:
где - средняя масса одного квадратного метра поверхности фюзеляжа; - смачиваемая поверхность фюзеляжа.
Значительное влияние на массу фюзеляжа оказывает распределение массы груза по длине, и высоте h рабочей части фюзеляжа.
При определении оптимального диаметра несущих и рулевого винтов очень важно учесть влияние на массу фюзеляжа расстояния между осями винтов, при сохранении по возможности длины рабочей части фюзеляжа. В этом случае массу фюзеляжа следует определять по формуле:
где - массовый коэффициент фюзеляжа; - относительное удлинение фюзеляжа.
Значения, можно определить в соответствии со статистическими данными современных вертолетов.
При изменении диаметра несущего винта на вертолетах одновинтовой и поперечной схемы значение можно принять неизменным.
Система управления вертолетом для оценки массы состоит из двух частей:
Бустерной системы управления несущим винтом (или винтами, включая рулевой винт);
Проводки управления от командных рычагов до основных бустеров, называемую добустерной или ручной проводкой управления.
Различие между этими частями системы управления заключается в том, что бустерная система рассчитывается на нагрузки лопастей винтов, увеличивающиеся с размерами винтов, а добустерная система управления - только от усилий пилотов при однокаскадной системе управления и от усилий пилотов и малых бустеров в двухкаскадной системе управления:
где - масса системы управления вертолетом; - масса бустерной системы управления вертолетом; - масса ручной системы управления вертолетом.
Современный уровень совершенства конструкций автомата перекоса и бустеров позволяет сделать вывод, что относительная масса бустерного управления пропорциональна хорде лопасти, ее радиусу и не зависит ни от каких других параметров вертолета:
где = 13...14.
В состав ручной проводки управления кроме управления до основных бустеров вводятся другие виды управления, в той числе системы управления двигателями, стабилизатором, системой управления грузовым створками, трапами и капотами. У одновинтового и соосного вертолета длины всех проводок, кроме проводки к рулевому винту, невелики. Считая общую длину проводки пропорциональной радиусу лопасти, молено принять:
где =7..10 кг/м для вертолетов, не имеющих вспомогательных систем;
18...25 кг/м вертолетов, имеющих вспомогательное управление, в том числе и систему уборки и выпуска шасси.
Для двухвинтовых вертолетов продольной и поперечной схемы длина проводки возрастает. Полагая длину такой проводки пропорциональной расстоянию между винтами, ее массу можно оценить по формуле:
где = 30 кг/м для вертолетов продольной схемы; =35 кг/м для вертолетов поперечной схемы. Применение электрической системы управления может снизить значения в 1.5…2,0 раза для вертолетов поперечной схемы.
Массу шасси следует оценивать в процентах от взлетной массы. Коэффициент кш зависит от величины приведенных нагрузок на стойки шасси, а также их конструктивного исполнения. В частности, масса убирающегося шасси скоростных вертолетов возрастает за счет уборки и выпуска цилиндров и замков.
Наиболее рационально распределяются приведенные нагрузки для вертолетов одновинтовой и соосной схемы, для которых = 0,02, для продольной схемы = 0,024, для вертолета поперечной схемы = 0,028.
Тогда, используя статистические данные, массу шасси молено определить по формуле:
где - взлетная масса проектируемого вертолета.
Статистика показывает, что наиболее легкими оказываются полозковые шасси легких вертолетов = 0.01, а, наиболее тяжелыми - шасси вертолета-крана, рассчитанного на перевозку грузов, закрепленных между опорами шасси, как у вертолета Ми -8 = 0.06.
Масса оборудования должна включать в себя массы пилотажно- навигационного и приборного оборудования, радиооборудования, электрооборудования, оборудования кабин экипажа, салона и грузовой кабины, а также ряда систем специального оборудования:
Масса всех видов оборудования значительно зависит от назначения вертолета, его размеров и схемы, поэтому ее можно определить достаточно точно на заключительном этапе путем суммирования. Так как значительная часть массы приходится на электрооборудование, то с учетом массы генераторов, проводов и электронагревателей лопастей можно определить массу электрооборудования:
где = 22...24 кг/м; = R лопасти; = 5...6 кг/м2; - суммарная площадь лопастей.
Массу оборудования гражданских вертолетов без электрооборудования необходимо рассчитать по формуле:
где массовый коэффициент может измениться в диапазона от =1.6 ДО =2.65 в зависимости от ЭТТ.
На основании вышеизложенных формул, массу оборудования вертолета следует определить по формуле:
Полученные массы частей, агрегатов и систем вертолета следует занести в ведомость масс вертолета (таблица 6).
Для выполнения боевого задания и обеспечения безопасности полетов конструкция вертолета должна быть достаточно прочной и жесткой. Под прочностью имеют ввиду способность конструкции воспринимать, не разрушаясь, заданные внешние нагрузки, встречающиеся в процессе эксплуатации. Под жесткостью понимают способность конструкции сопротивляться деформированию под нагрузкой.
В процессе эксплуатации вертолет подвергается различным па характеру и величине нагрузкам: статическим (постоянным или медленно меняющимся по времени), динамическим (ударным и вибрационным). В зависимости от вида нагружения конструкция или отдельная ее часть должна обладать соответствующим видом прочности.
Сочетание необходимых значений различных видов прочности, обеспечивающее нормальную работу конструкции в пределах установленных ограничений и сроков, называют эксплуатационной прочностью.
В процессе эксплуатации прочность конструкции не остается неизменной. Большие нагрузки, близкие к предельным, могут вызывать остаточные деформации в ее элементах. Небольшие, но многократно повторяющиеся нагрузки вызывают развитие усталостных трещин, ослабляющих конструкцию. Происходят износ
трущихся деталей, абразивный износ лопастей НВ, лопаток газотурбинных двигателей под действием пыли, песка. Кроме того, при техническом обслуживании вносятся повреждения в виде вмятин, царапин, рисок, забоин и т. д. Все это приводит к постепенному снижению прочности конструкции и вынуждает ограничивать ресурс (налет в часах) вертолета.
В процессе эксплуатации на конструкцию постоянно действуют перепады температур, атмосферные осадки, пыль, солнечная радиация и т. д. Воздействие этих факторов вызывает коррозию элементов конструкции, растрескивание остекления и других неметаллических деталей, повреждение защитных покрытий. В результате приходится ограничивать календарное время эксплуатации техники (срок службы).
Таким образом, все указанные выше внешние факторы, снижающие прочность и ухудшающие эксплуатационные качества конструкции, ограничивают ее долговечность. Долговечностью летательного аппарата называют свойство сохранять работоспособность с учетом обслуживания и ремонта до некоторого предельного состояния, при котором нарушаются требования безопасности полетов, снижается эффективность эксплуатации. Показателями долговечности служат ресурс и срок службы.
Одной из основных задач технической эксплуатации авиационной техники является поддержание необходимой прочности в течение всего срока службы в условиях реальной эксплуатации.
Общие принципы расчета вертолета на прочность
В Нормах прочности предусматривается также: действие отрицательной перегрузки = -0,5 при вводе в планирование, энергичные развороты вертолета на висении, воздействие вертикальных и боковых порывов воздуха и др. Каждый из расчетных случаев является определяющим для прочности той или иной части или агрегата вертолета.
Посадочные расчетные случаи рассматривают различные варианты посадки: на все опоры, только на основные, посадка с боковым ударом и т. д.
Наземные расчетные случаи рассматривают воздействие ветра, буксировку вертолета по неподготовленной площадке и др.
Особая сложность расчета вертолета на прочность состоит в том, что основные его нагрузки, например, силы от лопастей НВ, имеют переменный по величине и направлению характер, что вызывает колебания самих лопастей и конструкции вертолета в целом. Такое нагружение называется динамическим. При длительном действии многократно повторяющихся нагрузок разрушение конструкции происходит при напряжениях, значительно меньших, чем при постоянной, статической нагрузке. Это объясняется явлением усталости материала.
В Нормах прочности приводятся также все необходимые данные для расчета жесткости конструкции, ее динамической прочности и ресурса (срока службы).
Понятие о расчете статической прочности
Если нагрузка конструкции постоянна или изменяется медленно, то деформации и напряжения в ней будут также постоянны или изменяться постепенно, пропорционально нагрузке, без колебательных процессов. Такое нагружение называется статическим.
Для вертолета статическими нагрузками можно считать: тягу несущего и рулевого винтов; центробежные силы лопастей; аэродинамические силы крыла и оперения.
Расчет на статическую прочность включает:
- - определение в соответствии с Нормами прочности величины и характера распределения расчетных нагрузок;
- - построение эпюр поперечной Q и продольной N сил, изгибающего и крутящего моментов для рассматриваемой части конструкции вертолета;
- - выявление наиболее нагруженных участков конструкции, в которых возможны наибольшие напряжения;
- - определение напряжений в элементах конструкции и сравнение их с разрушающими.
Статическая прочность конструкции обеспечивается, если напряжения в ее элементах не превышают разрушающих значений.
Однако обеспечение статической прочности еще не гарантирует безопасной эксплуатации вертолета, поскольку под действием переменных нагрузок в его конструкции возникают соответствующие переменные напряжения. Эти напряжения, накладываясь на постоянные, увеличивают суммарные напряжения, а также могут привести к усталостному разрушению конструкции.
Источники переменных нагрузок вертолета
Основные нагрузки вертолета носят переменный характер, они постоянно изменяются по величине и направлению с определенными частотами.
Основными источниками переменных нагрузок являются несущий и рулевой винты. Причиной периодического изменения сил, действующих на лопасти НВ, является непрерывное изменение скорости и направления набегающего на них потока в различных азимутах и в различных сечениях при поступательном полете вертолета. Когда лопасть при своем вращении движется навстречу набегающему на вертолет потоку, суммарная скорость ее обтекания увеличивается, а при движении назад, напротив, уменьшается. Поскольку аэродинамические силы пропорциональны квадрату скорости обтекания, подъемная сила Ул и лобовое сопротивление Хл лопасти также постоянно изменяются. Это вызывает маховое движение лопастей в вертикальной плоскости и колебания в плоскости вращения.
При маховом движении центры масс лопастей периодически приближаются и удаляются от оси винта, что вызывает появление переменных кориолисовых сил, действующих в плоскости вращения. Эти силы также вызывают колебания лопастей в плоскости вращения.
Все эти переменные силы передаются на втулку НВ и далее через вал винта и редуктор на фюзеляж вертолета, вызывая его колебания в вертикальной и горизонтальной плоскостях. Амплитуды переменных сил, передаваемых с лопастей, могут составлять тысячи ньютон, а для тяжелых вертолетов - десятки тысяч. Частоты этих сил кратны произведению частоты вращения винта на число лопастей.
Дополнительными источниками переменных сил могут явиться плохая балансировка и несоконусность лопастей. Плохая балансировка заключается в неодинаковых статических моментах лопастей, что вызывает неуравновешенность их центробежных сил. Несоконусность проявляется в различных амплитудах махового движения лопастей вследствие отличий их внешних форм, жесткости на кручение или неточной регулировки установочных углов. По тем же причинам возникают переменные силы рулевого винта.
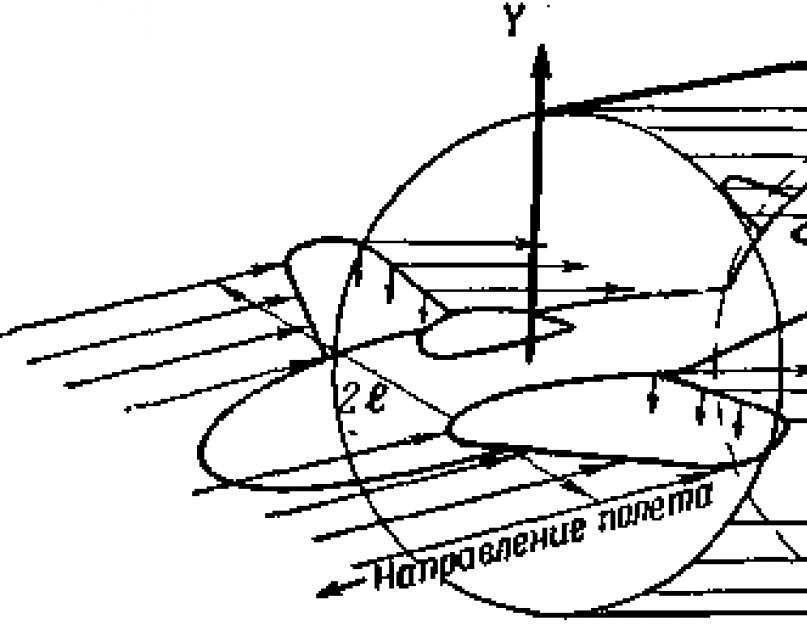
IПодъемная сила и тяга для поступательного движения у вертолета создаются при помощи несущего винта. Этим он отличается от самолета и планера, у которых подъемная сила при движении в воздухе создается несущей поверхностью - крылом, жестко соединенным с фюзеляжем, а тяга - воздушным винтом или реактивным двигателем (рис. 6).
В принципе полета самолета и вертолета можно провести аналогию. В том и другом случае подъемная сила создается за счет взаимодействия двух тел: воздуха и летательного аппарата (самолета или вертолета).
По закону равенства действия и противодействия следует, что с какой силой летательный аппарат действует на воздух (вес или земное притяжение), с такой же силой воздух действует на летательный аппарат (подъемная сила).

При полете самолета происходит следующее явление: набегающий встречный поток воздуха обтекает крыло и за крылом скашивается вниз. Но воздух представляет собой неразрывную, достаточно вязкую среду, и в этом скашивании участвует не только слой воздуха, находящийся в непосредственной близости от поверхности крыла, но и соседние слои его. Таким образом, при обтекании крыла за каждую секунду скашивается вниз назад довольно значительный объем воздуха, приблизительно равный объему цилиндра, у которого сечением является круг диаметром, равным размаху крыла, а длина - скорость полета в секунду. Это есть не что иное, как секундный расход воздуха, участвующего в создании подъемной силы крыла (рис. 7).
Рис. 7. Объем воздуха, участвующего в создании подъемной силы самолета
Из теоретической механики известно, что изменение количества движения за единицу времени равно действующей силе:
где Р - действующая сила;
в результате взаимодействия с крылом самолета. Следовательно, подъемная сила крыла будет равна секундному приросту количества движения по вертикали в уходящей струе.
и - скорость скоса потока за крылом по вертикали в м/сек. Точно так же можно выразить полную аэродинамическую силу несущего винта вертолета через секундный расход воздуха и скорость скоса потока (индуктивную скорость уходящей струи воздуха).Вращающийся несущий винт сметает поверхность, которую можно представить себе как несущую, аналогичную крылу самолета (рис. 8). Воздух, протекающий через поверхность, сметаемую несущим винтом, в результате взаимодействия с вращающимися лопастями отбрасывается вниз с индуктивной скоростью и. В случае горизонтального или наклонного полета воздух притекает к поверхности, сметаемой несущим винтом под некоторым углом (косая обдувка). Как и у самолета, объем воздуха, участвующего в создании полной аэродинамической силы несущего винта, можно представить в виде цилиндра, у которого площадь основания равна площади поверхности, сметаемой несущим винтом, а длина - скорости полета, выраженной в м/сек.


При работе несущего винта на месте или в вертикальном полете (прямая обдувка) направление воздушного потока совпадает с осью несущего винта. В этом случае воздушный цилиндр будет расположен вертикально (рис. 8, б). Полная аэродинамическая сила несущего винта выразится как произведение массы воздуха, протекающего через поверхность, сметаемую несущим винтом за одну секунду, на индуктивную скорость уходящей струи:
индуктивная скорость уходящей струи в м/сек. Необходимо оговориться, что в рассмотренных случаях как для крыла самолета, так и для несущего винта вертолета за индуктивную скорость и принимается индуктивная скорость уходящей струи на каком-то удалении от несущей поверхности. Индуктивная скорость струи воздуха, возникающая на самой несущей поверхности имеет в два раза меньшую величину.Такое толкование происхождения подъемной силы крыла или полной аэродинамической силы несущего винта не является совершенно точным и справедливо только в идеальном случае. Оно лишь принципиально правильно и наглядно объясняет физический смысл явления. Здесь же уместно отметить одно очень важное обстоятельство, вытекающее из разобранного примера.
Если полная аэродинамическая сила несущего винта выражается как произведение массы воздуха, протекающего через поверхность, ометаемую несущим винтом, на индуктивную скорость, а объем этой массы есть цилиндр, у которого основанием является площадь поверхности, ометаемой несущим винтом, и длиной - скорость полета, то совершенно ясно, что для создания тяги постоянной величины (например, равной весу вертолета) при большей скорости полета, а значит, и при большем объеме отбрасываемого воздуха, требуется меньшая индуктивная скорость и, следовательно, меньшая мощность двигателя.
Наоборот, для поддержания вертолета в воздухе при “висении” на месте требуется больше мощности, чем во время полета с некоторой поступательной скоростью, при которой имеет место встречный поток воздуха за счет движения вертолета.
Иными словами, при затрате одной и той же мощности (например, номинальной мощности двигателя) в случае наклонного полета с достаточно большой скоростью можно достичь большего потолка, чем при вертикальном подъеме, когда общая скорость перемещения
вертолета меньше, чем в первом случае. Поэтому у вертолета имеется два потолка: статический , когда высота набирается в вертикальном полете, и динамический , когда высота набирается в наклонном полете, причем динамический потолок всегда выше статического .В работе несущего винта вертолета и воздушного винта самолета есть много общего, но имеются и принципиальные отличия, о которых будет сказано дальше.
Сравнивая их работу, можно заметить, что полная аэродинамическая сила, а следовательно, и тяга несущего винта вертолета, являющаяся составляющей силы
R в направлении оси втулки, всегда больше (в 5-8 раз) при одинаковой мощности двигателя и одинаковом весе летательных аппаратов за счет того, что диаметр несущего винта вертолета в несколько раз больше диаметра воздушного винта самолета. При этом скорость отбрасывания воздуха у несущего винта меньше, нежели скорость отбрасывания у воздушного винта.Величина тяги несущего винта в очень большой степени зависит от его диаметра
D и числа оборотов. При увеличении диаметра винта в два раза тяга его увеличится приблизительно в 16 раз, при увеличении числа оборотов вдвое тяга увеличится приблизительно в 4 раза. Кроме того, тяга несущего винта зависит также от плотности воздуха ρ, угла установки лопастей φ (шага несущего винта), геометрических и аэродинамических характеристик данного винта, а также от режима полета. Влияние последних четырех факторов выражается обычно в формулах тяги воздушного винта через коэффициент тяги а т . .Таким образом, тяга несущего винта вертолета будет пропорциональна:
- коэффициенту тяги ............. α rНеобходимо отметить, что на величину тяги при полетах у земли оказывает влияние так называемая “воздушная подушка”, благодаря чему вертолет может оторваться от земли и подняться на несколько метров при затрате мощности меньшей, чем та, которая необходима для “висения” на высоте 10-15 м. Наличие “воздушной подушки” объясняется тем, что воздух, отбрасываемый винтом, ударяется о землю и несколько поджимается, т. е. увеличивает свою плотность. Влияние “воздушной подушки” особенно сильно сказывается при работе винта у земли. За счет поджатия воздуха тяга несущего винта в этом случае, при одной и той же затрате мощности, увеличивается на 30-
40%. Однако с удалением от земли это влияние быстро уменьшается, а при высоте полета, равной половине диаметра винта, “воздушная подушка” увеличивает тягу только на 15- 20%. Высота “воздушной подушки” приблизительно равна диаметру несущего винта. Далее прирост тяги исчезает.Для грубого расчета величины тяги несущего винта на режиме висения пользуются следующей формулой:
коэффициент, характеризующий аэродинамическое качество несущего винта и влияние “воздушной подушки”. В зависимости от характеристик несущего винта величина коэффициента а при висении у земли может иметь значения 15 - 25.Несущий винт вертолета обладает исключительно важным свойством - способностью создавать подъемную силу на режиме самовращения (авторотации) в случае остановки двигателя, что позволяет вертолету совершать безопасный планирующий или парашютирующий спуск и посадку.
Вращающийся несущий винт сохраняет необходимое число оборотов при планировании или парашютировании, если его лопасти будут переведены на небольшой угол установки
(l--5 0) 1 . При этом сохраняется подъемная сила, обеспечивающая спуск с постоянной вертикальной скоростью (6-10 м/сек), с последующим уменьшением ее при выравнивании перед посадкой до l--1,5 м/сек.В работе несущего винта в случае моторного полета, когда мощность от двигателя передается на винт, и в случае полета на режиме самовращения, когда энергию для вращения винта он получает от встречной струи воздуха, имеется существенное отличие.
В моторном полете встречный воздух набегает на несущий винт сверху или сверху под углом. При работе винта на режиме самовращения воздух набегает на плоскость вращения снизу или под углом снизу (рис. 9). Скос потока за несущим винтом в том и другом случае будет направлен вниз, так как индуктивная скорость согласно теореме о количестве движения будет направлена прямо противоположно тяге, т. е. приближенно вниз по оси несущего винта.
Здесь речь идет об эффективном угле установки в отличие от конструктивного.Отправить свою хорошую работу в базу знаний просто. Используйте форму, расположенную ниже
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Размещено на http://www.allbest.ru/
Московский Авиационный институт
(технический университет)
Курсовая работа по предмету:
Аэродинамический расчет вертолета
“Расчет аэродинамических характеристик вертолета Хьюз-500Е”
Выполнил студент гр. У1-301:
Шевляков П. А.
Проверил преподаватель:
Шайдаков
Москва 2007
Схема вертолета Хьюз-500Е
Технические данные вертолета Хьюз-500Е
Аэродинамические характеристики элементов вертолета
1. Аэродинамические характеристики фюзеляжа
2. Аэродинамические характеристики крыльев и хвостового оперения
3. Сопротивление втулок несущих и рулевых винтов
4. Сопротивление шасси и других выступающих элементов
Определение границ срыва на различных высотах
Определение коэффициента подъемной силы су
Расчет мощности, необходимой для вращения несущего винта
1. Определение профильной мощности
2. Определение индуктивной мощности
3. Мощность на преодоление сопротивления вертолета (вредная мощность)
4. Определение мощности, потребной для горизонтального полета
Расчет располагаемой мощности
Расчет расхода топлива
Библиография
Схема вертолета Хьюз-500Е
Технические данные вертолета Хьюз-500Е
|
ХЬЮЗ - 500Е, США, пассажирский |
|||||||||||||||||
|
ВЕРТОЛЕТ |
ЛЕТНО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ |
||||||||||||||||
|
МАССА, кг. ОТНОСИТЕЛЬНАЯ МАССА, % |
взлетн. макс. |
КР Ы ЛО |
|||||||||||||||
|
p = G / F , кг/м 2 |
взлетн. норм. |
скорость макс. на высоте |
|||||||||||||||
|
N = N УM / G , кВт/кг |
снаряженного |
удлинение |
скорость макс. на высоте |
||||||||||||||
|
V кр G Н, км/ч |
угол. заклинения |
скорость макс. кр. на высоте |
|||||||||||||||
|
V кр G Н, т·км/ч |
служ. нагр. |
ФЮЗ Е ЛЯЖ |
скорость макс. кр. на высоте |
||||||||||||||
|
год н.р., 1 п., с.в. |
груза и топл. макс. |
ширина макс. |
скорость эконом. на высоте |
||||||||||||||
|
пасс., дес., ран. |
груза и топл. норм. |
высота макс. |
скорость эконом. на высоте |
||||||||||||||
|
l г, b г, h г |
нагрузки макс. |
диаметр экв. |
скороподъемн. вертикальн. |
||||||||||||||
|
l сл, b сл, h сл |
нагрузки норм. |
площ. миделя |
скороподъемность макс. |
||||||||||||||
|
l н-р, l кор |
платн. нагр. макс. |
площ. поверхнос. |
скороподъемн. с 1 отказ. дв. |
||||||||||||||
|
платн. нагр. норм. |
потолок статический |
||||||||||||||||
|
СИЛОВАЯ УСТАНОВКА |
Аллисон 250-С20В, США |
КАБИНА |
потолок статический у земли |
||||||||||||||
|
кол. и тип |
1 ТВД, 420 л.с. |
лопастей |
ширина макс. |
потолок динамический |
|||||||||||||
|
высота макс. |
потолок дин. с 1 отказ. дв. |
||||||||||||||||
|
N , кВт |
нес. винтов |
площ. пола |
дальность |
||||||||||||||
|
C е , кг/кВт·ч |
трансмиссии |
объем кабины |
с резервом топлива |
||||||||||||||
|
N огр, кВт |
силов. установки |
объем багажн. |
с запасом топлива |
||||||||||||||
|
n дв, 60/с |
подъемн. установки |
ОПЕР Е НИЕ |
размах г.о. |
||||||||||||||
|
n нв, 60/с |
фюзеляжа |
площадь г.о. |
километр. расход топлива |
||||||||||||||
|
n рв, 60/с |
оперен. и Р. В. |
удлинение г.о. |
относит. 100 км расход |
||||||||||||||
|
масса; уд. масса |
сужение г.о. |
дальность на высоте |
|||||||||||||||
|
высотность, ресурс |
конструкции |
плечо г.о. |
относит. 100 км расход |
||||||||||||||
|
год выпуска, цена |
оборуд. и управл. |
высота в.о. |
перегоночн. дальность |
||||||||||||||
|
колич. пропел., диаметр |
площадь в.о. |
с запасом топлива |
|||||||||||||||
|
колич. лопастей, n вр, 60/с |
НЕСУЩИЙ И РУЛЕВОЙ ВИНТЫ |
плечо в.о. |
продолжительность |
||||||||||||||
|
ёмкость баков, л |
ШАССИ |
тип и кол. опор |
Примечания1) i = 12,594; i p = 1,956ДG п = -0,37%ист. инф. |
||||||||||||||
|
Производство до 1985 г. Выпуск 140 |
омет. площадь |
||||||||||||||||
|
коэф. заполнения |
|||||||||||||||||
|
сужение лопасти |
|||||||||||||||||
|
крутка лопасти |
давление, кПа |
||||||||||||||||
|
хорда лопасти |
|||||||||||||||||
|
проф. концев. |
|||||||||||||||||
|
проф. корнев. |
|||||||||||||||||
|
с конц. |
|||||||||||||||||
|
с корн. |
|||||||||||||||||
|
щ R |
|||||||||||||||||
|
с Т /д |
|||||||||||||||||
|
М v |
|||||||||||||||||
Размещено на http://www.allbest.ru/
Аэродинамические характеристики элементов вертолета
1. Аэродинамические характеристики фюзеляжа
расчет мощность вращение винт
Коэффициент сопротивления фюзеляжа в первом приближении можно определить по формуле:
k б - коэффициент, учитывающий изменение сопротивления по углу атаки фюзеляжа б ф;
с xf - коэффициент трение плоской пластины при числе Re = Re ф;
F ф - полная смачиваемая поверхность фюзеляжа;
Коэффициент, учитывающий влияние удлинения фюзеляжа на его сопротивление;
S мф - площадь миделя фюзеляжа;
Дс х н, Дс х ц, Дс х хв - коэффициенты, учитывающие увеличение сопротивления за счет формы носовой, центральной и хвостовой частей фюзеляжа или хвостовой балки;
Дс х над - коэффициент сопротивления надстроек, установленных на фюзеляже (подвесные топливные баки и т. п.)
V = 13,88 м/с - скорость набегающего потока;
l ф = 7,0 м - длина фюзеляжа;
х = 1,71·10 5 - коэффициент кинематической вязкости, зависящий от атмосферных условий (р а = 760 мм. рт. ст., t = 15 ?С).
По графику с xf = f (Re), представленному на рисунке 3.2 , определим коэффициент трения, зависящий от состояния пограничного слоя с xf .
с xf H = 0 = 0,0021;
с xf H = 2000 = 0,0022.
По графику = f (л ф), представленному на рисунке 3.3 определим = 1,35
где: d эф = 1,74 - эквивалентный диаметр фюзеляжа.
Выражение определяет коэффициент сопротивления фюзеляжа, как тела вращения, при б ф = 0.
Подставив в это выражение F ф = 22,0 м 2 и S мф = 2,38 м 2 получим:
Коэффициент сопротивления носовой части фюзеляжа принимаем Дс x н = 0.
Коэффициент Дс x ц учитывает отличие формы поперечного сечения средней части фюзеляжа от круга. Для прямоугольного сечения Дс x ц = 0,015…0,018.
Выбираем Дс x ц = 0,016.
На рисунке 3.7 представлена зависимость k б = f (б ф), где для схемы вертолета №2 k б принимает следующие значения:
Форма хвостовой части фюзеляжа очень сильно влияет на его сопротивление. При отрыве потока в этой области возникает пониженное давление, что приводит к появлению так называемого донного сопротивления.
Для того, чтобы избежать отрыва потока хвостовая часть фюзеляжа должна иметь плавное сужение.
При удлинении л хв > 2 донное сопротивление Дс x хв исчезает, поскольку обтекание становится практически безотрывным.
Поперечное сужение хвостовой балки,
где: l хв = 4,56 - длина хвостовой балки.
Тогда Дс x хв = 0,035 при б ф = 0 (рисунок 3.19 ).
Коэффициент сопротивления надстроек, выходящих за мидель фюзеляжа, определяем по формуле:
Таким образом, коэффициент сопротивления фюзеляжа составит:
2. Аэродинамические характеристики крыльев и хвостового оперения
Коэффициент сопротивления горизонтального оперения определим по формуле:
с х го = с хр 0 + Дс х ,
где:
с хр0 = 0,008;
Дс х = 0,0006 - добавочный коэффициент, учитывающий наличие заклепок и технологическую неровность поверхности.
с х го = 0,008+0,0006 = 0,0086
Коэффициент сопротивления вертикального оперения определим по той же формуле, что и с х го для значений с хр = 0,004 и Дс х = 0,0006. Получим:
с х во = 0,004+0,0006 = 0,0046
3. Сопротивление втулок несущих и рулевых винтов
Коэффициент сопротивления втулок НВ и РВ с механическими шарнирами, отнесенный к максимальной площади их боковой проекции с х = 1,2…1,4. Для рулевого винта принимаем с х = 1,3. S рв = 0,02 м 2 . Величину c x ·S для несущего винта определим для значений с х = 1,3. S нв = 0,06 м 2 .
4. Сопротивление шасси и других выступающих элементов
Сопротивление неубирающегося шасси определяется как сумма сопротивлений колес, стоек и подкосов.
На вертолете Хьюз-500Е установлено полозковое шасси.
Основная доля сопротивления шасси приходится на амортизационные стойки. Для подсчитанной площади шасси S ш = 0,06 м 2 и с x = 1,0 получаем с xi · S i = 0,06 м 2 .
Коэффициенты сопротивления посадочного и проблескового огней, а так же антенны и других выступающих элементов определяем по таблице 2.2 учебного пособия .
Сводка лобовых сопротивлений
|
Наименование элемента вертолета |
с xi |
S i , м 2 |
с xi · S i , м 2 |
|
|
Втулка НВ |
||||
|
Втулка РВ |
||||
|
Горизонтальное оперение |
||||
|
Вертикальное оперение |
||||
|
Посадочный огонь |
||||
|
Проблесковый огонь |
||||
|
Антенна и некоторые выступающие элементы |
||||
У с xi · S i · k бпри Н = 0 |
У с xi · S i · k бпри Н = 2000 |
|||
c xi ·S i ·k б = f (б )
Определение границ срыва на различных высотах
Критическая скорость V кр определяется по графику
,
представленному на рисунке 5.13 . Здесь
,
где: у = 0,0674 - коэффициент заполнения;
с y max = 1,25
Аэродинамический коэффициент силы тяги несущего винта определяем по формуле:
- тяга винта;
m взл = 1610 - взлетная масса вертолета;
щR
R = 4,04 м - радиус несущего винта вертолета.
>
>
>
>
>
(км/ч)
км/ч
км/ч
км/ч
км/ч
км/ч
Здесь должен быть представлен график зависимости V кр = f (Н )
Среднее значение с у по диску несущего винта определяем по формуле:
,
Здесь ж = 0,94 - коэффициент концевых потерь;
k Т = 1,0 - коэффициент, учитывающий влияние формы лопасти на величину силы тяги.
Определение коэффициента подъемной силы с у
м = 0,1; м = 0,2; м = 0,3; Н = 0 км;
ш = 0; ; ; ; ; ; ; ; .
c y (ш) = c y 0 · f (ш)
Для м = 0,1
|
c y (ш) |
Для м = 0,2
|
c y (ш) |
Для м = 0,3
|
c y (ш) |
Здесь должен быть представлен график зависимости с у = f (ш)
Расчет мощности, необходимой для вращения несущего винта
1. Определение профильной мощности
Результаты расчетов профильной мощности для удобства пользования обычно представляются в безразмерном виде. Безразмерный коэффициент профильной мощности находится по формуле:
откуда:
Для приближенного определения m p используется формула:
,
где: с xp 0 - осредненный по диску винта коэффициент профильного сопротивления.
Величина с xp 0 находится в зависимости от среднего по диску винта значения с у , которое определяется по формуле Л. С. Вильдгрубе:
,
где: k p и k Т - коэффициенты Л. С. Вильдгрубе, учитывающие влияние формы лопасти в плане на величину профильной мощности и силу тяги. Принимаем
k p = 1,0; k Т = 1,0.
Здесь:
с Т = 0,01268 - аэродинамический коэффициент силы тяги несущего винта на высоте Н = 0, рассчитанный в предыдущем разделе;
щR = 202 м/с - окружная скорость концов лопастей;
R = 4,04 м - радиус несущего винта вертолета;
у = 0,0674 - коэффициент заполнения несущего винта вертолета;
с - плотность воздуха на высоте.
По графику, представленному на рисунке 5.6 определяем величину с xp 0 .
Для Н = 0 м
|
V , км/ч |
|||||||||
|
с у 0 |
|||||||||
|
с xp 0 |
|||||||||
|
m p |
|||||||||
|
N p , Вт |
Для Н = 2000 м
|
V , км/ч |
|||||||||
|
с у 0 |
|||||||||
|
с xp 0 |
|||||||||
|
m p |
|||||||||
|
N p , Вт |
2. Определение индуктивной мощности
Безразмерный коэффициент индуктивной мощности m i найдем из формулы подобия:
>
Величину m i можно определить по формуле:
,
где:
c Т - аэродинамический коэффициент силы тяги несущего винта;
- средняя по диску нормальная составляющая индуктивной скорости;
- коэффициент индукции одиночного несущего винта, учитывающий неравномерность распределения аэродинамической нагрузки по диску;
ж - коэффициент концевых потерь;
- коэффициент взаимовлияния, учитывающий взаимное индуктивное влияние несущего винта двухвинтовых вертолетов;
,
где:
д - угол наклона оси вихревого цилиндра (определяется из графика, представленного на рисунке 3.2 );
б - угол атаки, отсчитываемый от плоскости концов абсолютно жестких лопастей. Принимаем б = - 10?.
Полученные данные сведем в таблицу.
Для Н = 0 м
|
V , км/ч |
|||||||||
|
m i |
|||||||||
|
N i , Вт |
Для Н = 2000 м
|
V , км/ч |
|||||||||
|
m i |
|||||||||
|
N i , Вт |
3. Мощность на преодоление сопротивления вертолета (вредная мощность)
Мощность, необходимая на преодоление сопротивления рассчитывается по формуле:
|
V , км/ч |
|||||||||
|
N х Н =0 , Вт |
|||||||||
|
N х Н =2000 , Вт |
4. Определение мощности, потребной для горизонтального полета
Потребную для горизонтального полета мощность N р находим по следующей формуле:
N p - профильная мощность;
N i - индуктивная мощность;
N x -- вредная мощность;
Для Н = 0 м
|
V , км/ч |
N p , Вт |
N i , Вт |
N x , Вт |
N п, Вт |
|
Для Н = 2000 м
|
V , км/ч |
N p , Вт |
N i , Вт |
N x , Вт |
N п, Вт |
|
Расчет располагаемой мощности
Располагаемая мощность, подводимая к несущему винту вертолета, рассчитывается по формуле:
N д - суммарная мощность двигателей при определенной степени их дросселирования, заданных атмосферных условиях, высоте и скорости полета;
о = 0,93 - коэффициент, учитывающий потери мощности в трансмиссии, на привод различных агрегатов и др.;
о РВ - коэффициент, учитывающий потери мощности на привод рулевого винта одновинтового вертолета.
Коэффициент о РВ рассчитывается по формуле:
N PB - мощность, идущая на привод рулевого винта.
Затраты мощности на привод рулевого винта на режиме висения приближенно можно определить по графику, представленному на рисунке 6.1 , зависящие от относительного радиуса рулевого винта.
Если на вертолете установлен газотурбинный двигатель, его мощность определяется по формуле:
N д взл = 280 кВт - максимальная (взлетная) мощность двигателя при стандартных атмосферных условиях и нулевой скорости полета;
1,0 - степень дросселирования двигателя, определяющая режим его работы;
Относительное изменение мощности от высоты.
Принимаем и - из рисунка 6.3 ;
Относительное изменение мощности от скорости полета, которое определим по графику, представленному на рисунке 6.4 ;
|
V , км/ч |
|||||||||
Относительное изменение мощности от температуры окружающего воздуха. Принимаем, что
и (из рисунка 6.5 )
Полученные значения суммарной мощности двигателей при определенной степени их дросселирования, заданных атмосферных условиях, высоте и скорости полета для удобства сведем в таблицу.
|
V , км/ч |
|||||||||
|
N д Н =0 , Вт |
|||||||||
|
N д Н =2000 , Вт |
Для полученных значений суммарной мощности определим значения располагаемой мощности двигателя:
|
N расп Н =0 , Вт |
|||||||||
|
N расп Н =2000 , Вт |
Здесь должен быть представлен график зависимости
N p , N i , N x = f (V ) на высоте Н = 0
Здесь должен быть представлен график зависимости
N p , N i , N x = f (V ) на высоте Н = 2000
Расчет расхода топлива
Для определения максимальной продолжительности и дальности полета необходимо иметь зависимость удельного расход топлива двигателя (, кг/кВт·ч) от режима их работы, скорости полета и атмосферных условий. Приближенно они могут быть определены по формуле:
Здесь:
-
удельный расход топлива при взлетной мощности;
- его изменение в зависимости от высоты и скорости полета, температуры окружающего воздуха и степени дросселирования двигателя.
(по рисунку 6.3 )
(по рисунку 6.3 )
(по рисунку 6.4 )
(по рисунку 6.4 )
(по рисунку 6.6 )
Километровый расход топлива рассчитывается по формуле:
,
где:
N п - потребная мощность на заданной высоте и скорости горизонтального полета;
- удельный расход топлива двигателя;
о У - суммарный коэффициент использования мощности.
Часовой расход топлива рассчитывается по формуле:
Полученные величины сведем в таблицу.
Для Н = 0 м
|
N п, кВт |
|||||||||
|
q , кг/км |
|||||||||
|
Q , кг/ч |
Для Н = 2000 м
|
V , км/ч |
|||||||||
|
N п, кВт |
|||||||||
|
q , кг/км |
|||||||||
|
Q , кг/ч |
Максимальная продолжительность полета рассчитывается по формуле:
;
,
где:
m т - масса топлива, расходуемого в полете. Приближенно величину m т можно принять равной 85 % от общего запаса топлива.
Максимальная дальность полета рассчитывается по формуле:
Здесь должен быть представлен график зависимости
Q , q = f (V ) на высоте Н = 0
Здесь должен быть представлен график зависимости
Q , q = f (V ) на высоте Н = 2000
Библиография
1. Игнаткин Ю. М. Аэродинамический расчет вертолета. М.: МАИ, 1987.
2. Шайдаков В. И., Трошин И. С., Игнаткин Ю. М., Артамонов Б. Л. Алгоритмы и программы расчетов в задачах динамики вертолета. М.: МАИ, 1984.
3. Шайдаков В. И. Аэродинамический расчет вертолета. М.: МАИ, 1988.
Размещено на Allbest.ru
Подобные документы
Краткая характеристика несущего винта вертолета. Определение дальности и продолжительности полета. Подбор оптимальной конструкции лонжерона лопасти несущего винта легкого вертолета, с применением программы виртуального моделирования Solid Works.
дипломная работа , добавлен 01.07.2012
Расчет лобовых сопротивлений несущих элементов, фюзеляжа, мотогондол и подвесных баков летательного аппарата в условиях полностью турбулентного пограничного слоя. Зависимость лобового сопротивления ЛА по углу атаки. Расчет и построение поляры крыла.
курсовая работа , добавлен 03.12.2013
Расчет тяги несущего винта и крутящего момента лопасти вертолета. Построение трехмерной модели лонжерона. Применение метода конечных элементов для определения потенциальной энергии деформации и работы внешних сил. Решение задачи устойчивости вертолета.
реферат , добавлен 23.09.2013
Расчет геометрических характеристик фюзеляжа самолета, горизонтальное оперение. Расчет минимального коэффициента лобового сопротивления пилона. Взлетно-посадочные характеристики самолета. Построение зависимости аэродинамического качества от угла атаки.
курсовая работа , добавлен 29.10.2012
Вычисление аэродинамических характеристик исследуемой ракеты: подъемная сила, производная коэффициента подъемной силы летательного аппарата, лобовое сопротивление, момент тангажа. Структура системы SolidWorks 2014 Выбор углов атаки и скорости потока.
курсовая работа , добавлен 20.12.2015
История создания самолета, его массо-геометрические и летно-технические характеристики. Аэродинамические характеристики профиля RAF-34. Определение оптимальных параметров движения. Балансировка и расчет аэродинамических параметров заданного вертолета.
курсовая работа , добавлен 26.08.2015
Расчет сопротивления воды движению судна. Расчет контура лопасти гребного винта. Распределение толщин лопасти по ее длине. Профилирование лопасти винта. Построение проекций лопасти винта, параметры ступицы. Определение массы гребного винта судна.
курсовая работа , добавлен 08.03.2015
Определение элементов циркуляции судна расчетным способом. Расчет инерционных характеристик судна - пассивного и активного торможения, разгона судна при различных режимах движения. Расчет увеличения осадки судна при плавании на мелководье и в каналах.
методичка , добавлен 19.09.2014
Особенности построения теоретического профиля НЕЖ с помощью конформного отображения Н.Е. Жуковского. Геометрические параметры и сопротивление летательного аппарата. Методика определения сквозных и аэродинамических характеристик летательного аппарата.
курсовая работа , добавлен 19.04.2010
Исследование взлетно-посадочных характеристик самолета: определение размеров крыла и углов стреловидности; расчет критического числа Маха, аэродинамического коэффициента лобового сопротивления, подъемной силы. Построение взлётной и посадочной поляр.
Введение
Проектирование вертолета представляет собой сложный, развивающийся во времени процесс, разделяющийся на взаимосвязанные проектные стадии и этапы. Создаваемый летательный аппарат должен удовлетворять техническим требованиям и соответствовать технико-экономическим характеристикам, указанным в техническом задании на проектирование. Техническое задание содержит исходное описание вертолета и его летно-технические характеристики, обеспечивающие высокую экономическую эффективность и конкурентоспособность, проектируемой машины, а именно: грузоподъемность, скорость полета, дальность, статический и динамический потолок, ресурс, долговечность и стоимость.
Техническое задание уточняется на стадии предпроектных исследований, в ходе которых выполняются патентный поиск, анализ существующих технических решений, научно-исследовательские и опытно-конструкторские работы. Основной задачей пред проектных исследований является поиск и экспериментальная проверка новых принципов функционирования проектируемого объекта и его элементов.
На стадии эскизного проектирования выбирается аэродинамическая схема, формируется облик вертолета и выполняется расчет основных параметров, обеспечивающих достижение заданных летно-технических характеристик. К таким параметрам относятся: масса вертолета, мощность двигательной установки, размеры несущего и рулевого винтов, масса топлива, масса приборного и специального оборудования. Результаты расчетов используются при разработке компоновочной схемы вертолета и составлении центровочной ведомости для определения положения центра масс.
Конструирование отдельных агрегатов и узлов вертолета с учетом выбранных технических решений выполняется на стадии разработки технического проекта. При этом параметры спроектированных агрегатов должны удовлетворять значениям, соответствующим эскизному проекту. Часть параметров может быть уточнена с целью оптимизации конструкции. При техническом проектировании выполняется аэродинамические прочностные и кинематические расчеты узлов, выбор конструкционных материалов и конструктивных схем.
На стадии рабочего проекта выполняется оформление рабочих и сборочных чертежей вертолета, спецификаций, комплектовочных ведомостей и другой технической документации в соответствии с принятыми стандартами
В данной работе представлена методика расчета параметров вертолета на стадии эскизного проектирования, которая используется для выполнения курсового проекта по дисциплине "Проектирование вертолетов".
1. Расчет взлетной массы вертолета первого приближения
где - масса полезного груза, кг;
Масса экипажа, кг.
Дальность полета
![]() кг.
кг.
2. Расчет параметров несущего винта вертолета
2.1 Радиус R, м, несущего винта вертолёта одновинтовой схемы рассчитывается по формуле:
 ,
,
где - взлетная масса вертолета, кг;
g - ускорение свободного падения, равное 9.81 м/с 2 ;
p - удельная нагрузка на площадь, ометаемую несущим винтом,
Значение удельной нагрузки p на ометаемую винтом площадь выбирается по рекомендациям, представленным в работе /1/: где p=280
Принимаем радиус несущего винта равным R=7.9
Угловая скорость w, с -1 , вращения несущего винта ограничена величиной окружной скорости wR концов лопастей, которая зависит от взлетной массы вертолета и составили wR=232 м/с.
![]() с -1 .
с -1 .
![]() об/мин.
об/мин.
2.2 Относительные плотности воздуха на статическом и динамическом потолках

2.3 Расчет экономической скорости у земли и на динамическом потолке
Определяется относительная площадь эквивалентной вредной пластинки:
Где S э =2.5
![]()
Рассчитывается значение экономической скорости у земли V з, км/час:
 ,
,
Рассчитывается значение экономической скорости на динамическом потолке V дин, км/час:
 ,
,
где I = 1,09…1,10 - коэффициент индукции.
2.4 Рассчитываются относительные значения максимальной и экономической на динамическом потолке скоростей горизонтального полета:
![]() ,
,
![]()
![]()
где V max =250 км/час и V дин =182.298 км/час - скорости полета;
wR=232 м/с - окружная скорость лопастей.
2.5 Расчет допускаемых отношений коэффицента тяги к заполнению несущего винта для максимальной скорости у земли и для экономической скорости на динамическом потолке:
![]()
2.6 Коэффициенты тяги несущего винта у земли и на динамическом потолке:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
2.7 Расчет заполнения несущего винта:
Заполнение несущего винта s рассчитывается для случаев полета на максимальной и экономической скоростях:
 ;
;
 .
.
В качестве расчетной величины заполнения s несущего винта принимается наибольшее значение из s Vmax и s V дин:
Принимаем
Длина хорды b и относительное удлинение l лопастей несущего винта будет равны:
Где z л -число лопастей несущего винта(z л =3)
![]() м,
м,
![]() .
.
2.8 Относительное увеличение тяги несущего винта для компенсации аэродинамического сопротивления фюзеляжа и горизонтального оперения:
 ,
,
где S ф -площадь горизонтальной проекции фюзеляжа;
S го -площадь горизонтального оперения.
S го =1.5 м 2 .



